|

















AVWS
Hener
| Iň ýokary agram kuwwaty: | |
|---|---|
| Ölçegi: | |
| mukdary: | |
Önümiň beýany
Häzirki döwürde çalt depginde ösýän dünýäde dürli pudaklarda, esasanam transport, logistika we söwda bilen baglanyşykly netijelilik we takyklyk birinji orunda durýar. Awtomatiki usulda agram salmak ulgamlary, awtomatlaşdyrmagy, takyklygy we amatlylygy teklip edip, agram amallaryny tertipleşdirmek üçin gymmatly çözgüt hökmünde ýüze çykdy. Bu giňişleýin gözlegde, häzirki zaman senagat şertlerinde ähmiýetini açyp, Awtoulag Awtomatiki Agram Ulgamlarynyň böleklerine, işleýşine we artykmaçlyklaryna göz aýlaýarys.
Bu datçikler agram salýan ýere barýan ulaglaryň bardygyny kesgitlemekde möhüm rol oýnaýar. Surfaceoluň üstünde goýlan aýlaw detektorlary, infragyzyl datçikler ýa-da ulagyň hereketini kesgitlemek üçin strategiki taýdan ýerleşýän optiki datçikler ýaly dürli görnüşleri alyp bilerler.
Ulag ýüze çykarylandan soň, agramy platforma ugrukdyrmak üçin ýol gözegçilik enjamlary işe girýär. Bu enjamlar takyk ölçemek üçin ulaglaryň dogry ýerleşmegini üpjün edýän svetoforlary, awtomatiki päsgelçilikleri ýa-da belgini öz içine alyp biler.
Aragatnaşyk ulgamlary agram ulgamy bilen ulagyň sürüjisiniň arasynda özara täsirleşmegi aňsatlaşdyrýar. Sürüjilere agram salmagy bes etmegi we agram salmak prosesi barada möhüm maglumatlary bermegi talap edýän görkezmeler berýär. Bu aragatnaşyk wizual displeýler, ses ýazgylary ýa-da elektron habarlaşma ulgamlary arkaly bolup biler.
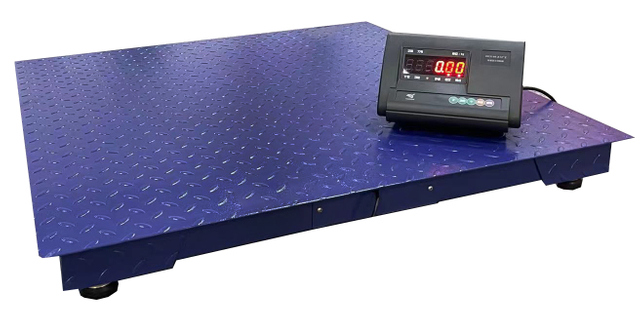
Awtomatiki usulda agram salmak ulgamynyň özeninde, agram platformasyna integrirlenen ýük öýjüklerini öz içine alýan agram enjamlary ýerleşýär. Bu ýük öýjükleri ulagyň we ýüküň agramyny ölçäp, mehaniki güýji takyk kesgitlemek üçin elektrik signallaryna öwürýär.
Awtomatiki usulda agram salmak ulgamlary, agyrlyk maglumatlaryny hakyky wagtda ele alýan, saklaýan we derňeýän çylşyrymly maglumat dolandyryş programma üpjünçiligi bilen doldurylýar. Bu programma üpjünçiligi, agram amallaryna netijeli gözegçilik etmäge, hasabatlary döretmäge we bökdençsiz iş akymyny dolandyrmak üçin beýleki iş ulgamlary bilen integrasiýa etmäge mümkinçilik berýär.


Agram salmak prosesiniň awtomatlaşdyrylmagy garaşmagyň wagtyny gysgaldýar we el bilen gatyşmagy azaldýar, netijede geçişiň we iş netijeliliginiň ýokarlanmagyna getirýär. Ulaglary iş prosesiniň öndürijiligini gowulandyryp, çalt we takyk ölçäp bolýar.
Awtomatiki usulda agram salmak ulgamy , agram ölçegleriniň berjaý edilmegini üpjün edýän we hasap-faktura, inwentar dolandyryş we ýük optimizasiýasy üçin maglumatlaryň ygtybarlylygyny ýokarlandyrýan takyk agram ölçeglerini berýär.
El bilen gözegçilik etmegiň zerurlygyny azaltmak we agram amallaryny ýönekeýleşdirmek bilen, Awtoulag Awtomatiki Agram Ulgamy wagtyň geçmegi bilen ep-esli tygşytlamagy teklip edýär. Kärhanalar zähmet çykdajylaryny azaldyp, amaly ROI-ni has köpeldip, serişdeleri has netijeli bölüp bilerler.
Awtomatlaşdyrylan ýol gözegçilik enjamlary we standart ölçeg proseduralary agram salýan ýerlerde howpsuzlygy ýokarlandyrmaga kömek edýär. Adamlaryň gatnaşmagynyň azalmagy heläkçilik töwekgelçiligini azaldýar we umumy iş ýeriniň howpsuzlygyny ýokarlandyrýar.
Awtomatiki usulda agram salmak ulgamlary ýokary göwrümli we dürli amaly talaplara uýgunlaşdyrylýar. Ösüp barýan iş zerurlyklaryny kanagatlandyrmak üçin uzak ýerlerde we wagtlaýyn desgalary goşmak bilen dürli ýerlere ýerleşdirilip bilner.
Awtomatiki ulag agramy ulgamy tarapyndan döredilen maglumatlaryň baýlygy kärhanalara habarly karar bermäge mümkinçilik berýär. Hakyky wagtlaýyn gözegçilik we derňew logistika, inwentar we ýerine ýetiriş bilen baglanyşykly işleri işjeň dolandyrmagy aňsatlaşdyrýar.
| Önümiň görnüşi | SCS-20 | SCS-30 | SCS-50 | SCS-60 | SCS-80 | SCS-100 | SCS-120 | SCS-150 |
| Iň ýokary agram ukyby (T) | 20 | 30 | 50 | 60 | 80 | 100 | 120 | 150 |
| Bölümiň bahasy (Kg) | 10 | 10 | 20 | 20 | 20 | 20 | 20 | 50 |
| Sensor kuwwaty (T) | 10 | 20 | 20 | 20 | 30 | 30 | 30 | 40 |
| Platformanyň ululygy: W x L (M) | Optimizasiýa spesifikasiýasy | |||||||
| 2x4 | ⭐ | |||||||
| 3x7 | ⭐ | ⭐ | ||||||
| 3x9 | ⭐ | ⭐ | ⭐ | |||||
| 3x10 | ⭐ | ⭐ | ⭐ | |||||
| 3x12 | ⭐ | ⭐ | ⭐ | |||||
| 3x14 | ⭐ | ⭐ | ⭐ | |||||
| 3x15 | ⭐ | ⭐ | ⭐ | ⭐ | ||||
| 3x16 | ⭐ | ⭐ | ⭐ | ⭐ | ⭐ | |||
| 3x18 | ⭐ | ⭐ | ⭐ | ⭐ | ||||
| 3.4x14 | ⭐ | ⭐ | ||||||
| 3.4x16 | ⭐ | ⭐ | ⭐ | ⭐ | ||||
| 3.4x18 | ⭐ | ⭐ | ⭐ | ⭐ | ||||
| 3.4x21 | ⭐ | ⭐ | ⭐ | ⭐ | ||||
Önümiň parametrleri
Gurluşy: Standart U şekilli şöhle
Bölüm: 20 kg
Polat: qualityokary hilli polat
Tingiwopis: Poslama we poslama garşy boýag
Takyklyk: OIML III
Kuwwaty: 220V150Hz
Iş temperaturasy: -35 (°) ~ + 70 (° C)
Otnositel çyglylyk: <95%
Ygtybarly ýüklemek: 120%
Garşylygy goramak enjamy
10 sim birikmesi gutusy
Suw geçirmeýän möhür bogunyny ulanmak
Bahalandyrylan kuwwat: 30 tonna
Giňişleýin takyklyk: OlML C3
Dökmek (30 minut): ≤ +/- 0.013% FS
Çyzyksyzlyk: ≤ +/- 0.010% FS
Gisterez: ≤ +/- 0.016% FS
lP gorag derejesi: lP68
Iş temperaturasy: -35 (℃) ~ + 70 (° C)
Ygtybarly artykmaç ýük: 120% FS
Ahyrky artykmaç ýük: 300% FS Germetiki möhürlenendir
Işleýiş temperaturasy: 0 ℃ ~ 40 ℃
Otnositel çyglylyk: ≤85% RH
Elektrik üpjünçiligi: 220V 50Hz
Geçiriş modeli: RS232C / RS422 / RS485
Baud derejesi: 600/1200/2400/4800/9600
Recordazgylary saklamak / barlamak / aýyrmak /
7. güýjüň öçürilmezligi Agram çäginden geçende ses duýduryşy
6 ýadro sim birleşme gutusyny we ýük öýjüklerini birleşdirýär
Statiki agram: ± 0,1% -den ± 1%
Pes tizlikli WIM: ± 2% -den ± 5%
Speokary tizlikli WIM: ± 5% -den ± 10%
Pes tizlikli WIM: sagatda 0-15 km
Speokary tizlikli WIM: sagatda 0-120 km ýa-da ondanam köp
Işleýiş temperaturasy: -40 ° C-den + 70 ° C.
Çyglylyk: 95% -e çenli kondensasiýa däl
ALPR ulgamlary
Trafik dolandyryş ulgamlary
Güýçlendirmek maglumat bazalary
Aýratynlyklary we wezipesi
Awtomatiki usulda agram salmak ulgamy el bilen gatyşmagyň zerurlygy bolmazdan özbaşdak işleýär. Ölçeg amallaryny awtomatiki ýerine ýetirmek, adam gözegçiliginiň zerurlygyny azaltmak we amallary tertipleşdirmek üçin ösen datçikleri, kameralary we programma üpjünçiliginiň algoritmlerini ulanýarlar.
Bu ulgamlar kompýuter torlary ýa-da bulut esasly platformalar arkaly agram çärelerine uzakdan gözegçilik etmäge mümkinçilik berýär. Ulanyjylar internet birikmesi bolan islendik ýerden, agram ölçeglerini, ulag maglumatlaryny we geleşik ýazgylaryny öz içine alýan real wagt maglumatlaryna, görnükliligini we agram amallaryna gözegçilik edip bilerler.
Awtomatiki usulda agram salmak ulgamy, awtomatiki kesgitlemek we maglumatlary ele almak üçin RFID ýa-da ştrih-kod tehnologiýasy bilen üznüksiz birleşýär. Bu integrasiýa, ulaglary ýa-da ýük maglumatlary el bilen girizmek zerurlygyny aradan aýyrýar, ýalňyşlyklary azaldýar we agram salmagyň netijeliligini ýokarlandyrýar.
Awtomatiki usulda agram salmak ulgamy bilen, agram salýan desgalar işgärleriň barlygyna bil baglamazdan, günde 24 sagat, hepdede 7 gün üznüksiz işläp biler. Gije-gündiziň dowamynda elýeterlilik, müşderiler üçin üznüksiz hyzmaty üpjün edýär we iş bilen meşgullanýan gurşawda has köp girdeji gazanýar.
Awtomatiki usulda agram salmak ulgamy, rugsatsyz girmekden we bozulmakdan goramak üçin gurlan howpsuzlyk çäreleri. Duýgur maglumatlary goramak we howpsuzlyk düzgünleriniň berjaý edilmegini üpjün etmek üçin biometrik tanamak, giriş gözegçiligi we gözegçilik kameralary ýaly aýratynlyklary öz içine alyp biler.
Hyzmat
Takyk ölçegleri üpjün etmek üçin ösen, kalibrlenen agram enjamlaryny ulanyň.
Mikrogrammalardan tonna çenli dürli agramlary we ululyklary dolandyrmak üçin dürli terezini üpjün ediň.
Takyk netijeleri bermek üçin ähli agram enjamlarynyň yzygiderli kalibrlenýändigine we saklanýandygyna göz ýetiriň.
Senagat standartlaryna we kadalaşdyryjy talaplara laýyk gelýän sertifikat hyzmatlaryny teklip ediň.
Islendik soragy ýa-da meseläni çözmek üçin telefon, e-poçta ýa-da söhbet arkaly gije-gündiziň dowamynda goldaw beriň.
Gurnamak, näsazlyklary düzetmek we tehniki hyzmat etmek üçin ýerdäki goldawy teklip ediň.
Müşderiniň ERP ýa-da inwentar dolandyryş ulgamlaryna aňsatlyk bilen birleşdirilip bilinjek jikme-jik, sanly agram hasabatlaryny beriň.
Müşderilere öz agram maglumatlaryny hakyky wagtda yzarlamaga we dolandyrmaga mümkinçilik berýän ykjam programma dörediň.
Müşderiniň aýratyn isleglerini kanagatlandyrmak üçin ýöriteleşdirilen agram çözgütlerini, şol sanda agram salmak ulgamlaryny we amallaryny teklip ediň.
Müşderilere agram amallaryny optimizirlemek we netijeliligi ýokarlandyrmak üçin hünärmenleriň maslahatyny beriň.
Müşderilere agram salmak we enjamlary ulanmak boýunça iň oňat tejribeleri öwretmek üçin yzygiderli okuw sapaklaryny we seminarlary geçiriň.
Equipmenthli enjamlar we hyzmatlar üçin giňişleýin gollanmalar we gollanmalar bilen üpjün ediň.
Howpsuz we çalt agram amallaryny üpjün etmek üçin netijeli işlemek proseduralaryny ýerine ýetiriň.
Müşderi üçin amatlylyk goşup, agram salmaly zatlar üçin alma we eltip bermek hyzmatlaryny teklip ediň.
Ekologiýa taýdan arassa müşderileri özüne çekmek üçin agram salmak prosesinde ekologiýa taýdan arassa tejribeleri we materiallary ulanyň.
Agram salmak döwründe emele gelen galyndy materiallaryny dogry ýok etmek we dolandyrmak üçin hyzmatlary teklip ediň.
Müşderileriň näme töleýändiklerini anyk bilmeklerini üpjün edip, gizlin çykdajylary bolmadyk aç-açan nyrh gurluşyny üpjün ediň.
Müşderilere amallary aňsatlaşdyrmak üçin onlaýn tölegleri goşmak bilen birnäçe töleg opsiýalaryny teklip ediň.
Hyzmatlary yzygiderli gowulandyrmak üçin müşderileriň pikirlerini yzygiderli soraň we derňäň.
Hyzmatyň hilini we müşderiniň kanagatlylygyny ýokarlandyrmak üçin üznüksiz kämilleşdiriş işini amala aşyryň.
Sorag-jogap
Jogap: AVWS ulaglaryň agramyny dinamiki ýa-da statiki ölçemek üçin ulanylýan tehnologiýa. Bu ulgamlar hereketli ulaglary (Weigh-in-Motion ýa-da WIM) durmagyny talap etmezden ýa-da stasionar bolanda (statiki agram) ölçäp bilýär. AVWS ulagyň agramyny almak, ulaglary kesgitlemek we maglumatlary ýerine ýetirmek we amaly maksatlar üçin saklamak üçin datçikleri, maglumatlary gaýtadan işleýän bölümleri we käwagt Awtomatiki ygtyýarnama plastinkasyny tanamak (ALPR) birleşdirýär.
Jogap : WIM ulgamy ulaglaryň üstünden sürüp barýarka agramyny ölçemek üçin ýoluň üstünde goýlan datçikleri ulanýar. Bu datçiklere piezoelektrik datçikler, ştamm ölçegleri ýa-da ýük öýjükleri girip biler. Ulgam, datçikleriň üstünden geçip barýarka, ulagyň beren güýjüne görä agramyny hasaplaýar. WIM ulgamlary real wagt maglumatlary berýär we traffige gözegçilik etmek, agram kadalaryny ýerine ýetirmek we logistikany optimizirlemek üçin peýdalydyr.
Jogap: AVWS ulanmagyň peýdalary şulary öz içine alýar:
Netijelilik : Ulaglaryň durmagyny talap etmezden çalt we takyk agram, bu dyknyşygy azaldýar we ulag akymyny gowulandyrýar.
Ylalaşyk : Ulaglaryň agyrlyk düzgünlerini berjaý etmegine, ýol zeperini azaltmaga we howpsuzlygy ýokarlandyrmaga kömek edýär.
Maglumat ýygnamak : Logistika meýilnamalaşdyrylyşyna we kadalaşdyryjy düzgünlere kömek edip, derňew üçin giňişleýin maglumatlary berýär.
Çykdajylary tygşytlamak : El bilen agram salmak, wagt we zähmet çykdajylaryny tygşytlamak zerurlygyny azaldar.
Jogap: AVWS ýeňil ulaglardan başlap, agyr ýük awtoulaglaryna çenli dürli ulaglary ölçäp biler. Ulgam köptaraply bolup, dürli ulag ululyklaryny we agramlaryny dolandyrmak üçin düzülip bilner, ulag, logistika, gurluşyk we oba hojalygy ýaly dürli pudaklarda ulanmak üçin amatly bolar.
Jogap : AVWS ulgamlarynyň takyklygy ulgamyň görnüşine we konfigurasiýasyna baglylykda üýtgäp biler. Statiki agram ulgamlary, adatça has ýokary takyklygy (± 0,1% -den ± 1%) hödürleýär, WIM ulgamlary bolsa ýokary tizlikli programmalar üçin ± 5% -den ± 10% aralygynda takyklygy üpjün edýär. Takyklygy saklamak yzygiderli kalibrlemäni, öňüni alyş hyzmatyny we ýokary hilli datçikleri ulanmagy öz içine alýar. Kalibrleme ulgamyň wagtyň geçmegi bilen ygtybarly agram ölçeglerini üpjün etmegini üpjün edýär.